Τα προστατευμένα συστήματα καλλιέργειας όπως τα θερμοκήπια γίνονται όλο και πιο δημοφιλή παγκοσμίως και έχουν υιοθετηθεί λόγω της δυνατότητας που παρέχουν στον παραγωγό για απόλυτο έλεγχο των συνθηκών καλλιέργειας.
Ωστόσο, περιορισμοί όπως τα επικίνδυνα περιβάλλοντα εργασίας και οι ελλείψεις στο εργατικό δυναμικό αποτελούν μείζονες ανησυχίες για τη γεωργική παραγωγή που χρησιμοποιεί αυτές τις δομές. Αυτό οδήγησε στην ανάπτυξη και υιοθέτηση ρομποτικών συστημάτων.
Για την αποδοτικότητα των ρομποτικών συστημάτων, μία ομάδα ερευνητών διερευνησε το πρόβλημα αποδοτικότητας της εργασίας και προσομοίωσε ένα τρισδιάστατο πρότυπο θερμοκήπιο φράουλας για να αναλύσει την αποτελεσματικότητα ενός ρομπότ συγκομιδής φράουλας σε σύγκριση με διαφορετικά επίπεδα ανθρώπινου δυναμικού (έμπειρο, μέσο και αρχάριο).
Οι προσομοιώσεις διεξάγονται χρησιμοποιώντας λογισμικό για να συγκρίνουν την αποτελεσματικότητα διαφορετικών σεναρίων ρομποτικής με τον άνθρωπο.
Εξετάζονται διάφοροι παράγοντες βελτίωσης από τη χωρητικότητα της μπαταρίας του συστήματος και το ρυθμό φόρτισης έως την ταχύτητα συγκομιδής και συνιστώνται οι βέλτιστες συνθήκες.
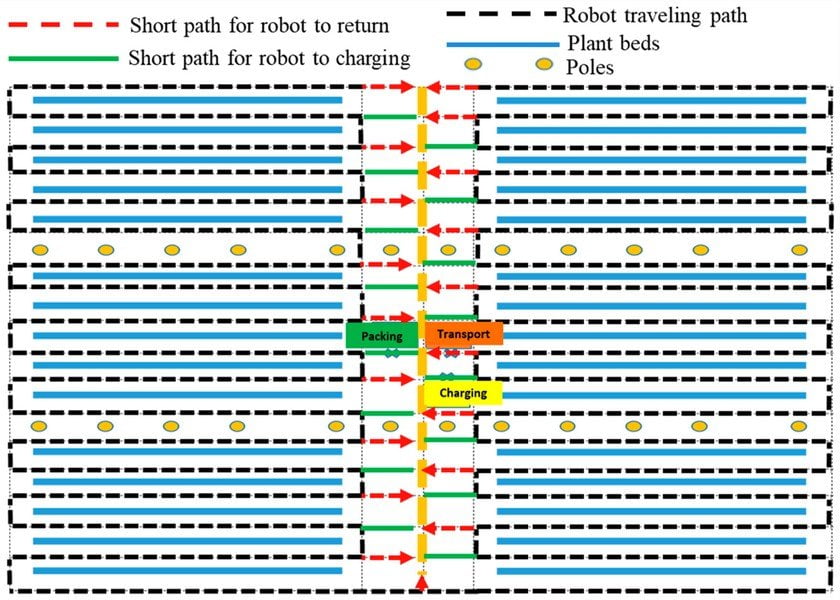
Διάδρομοι συγκομιδής και μεταφοράς ρομποτικού συστήματος
Η μέση ωριαία παραγωγή του ρομπότ είναι περίπου πέντε φορές χαμηλότερη από αυτήν των ειδικευμένων εργαζομένων. Ωστόσο, τα ρομπότ είναι πιο παραγωγικά λόγω της ικανότητάς τους να εργάζονται όλο το 24ωρο.
Συγκριτικές αναλύσεις δείχνουν ότι η μείωση του χρόνου συγκομιδής ανά φράουλα από 3 σε 1 δευτερόλεπτο θα είχε ως αποτέλεσμα την αύξηση της ημερήσιας παραγωγής από 347,93 σε 1021,30 kg. Αυτό θα οδηγούσε σε μια πενταπλάσια αύξηση σε σύγκριση με την παρούσα καθημερινή παραγωγή.
Μια βελτίωση κατά 10% στο χρόνο φόρτισης της μπαταρίας θα είχε ως αποτέλεσμα την αύξηση της χωρητικότητας της μπαταρίας κατά δύο επιπλέον ώρες από τις τρέχουσες 10 ώρες και θα μειώσει τις τρέχουσες 2 ώρες που απαιτούνται για φόρτιση σε 1 ώρα.
Ηλίας Παπαδόπουλος Γεωπόνος MSc i-CON.SHARE
Βιβλιογραφία
Woo, S.; Uyeh, D.D.; Kim, J.; Kim, Y.; Kang, S.; Kim, K.C.; Lee, S.Y.; Ha, Y.; Lee, W.S. Analyses of Work Efficiency of a Strawberry-Harvesting Robot in an Automated Greenhouse. Agronomy2020, 10, 1751.